实验室现有的数据集数量有限,局限于人体日常功能运动,比如摸头,摸嘴等。为了扩充人体上肢运动数据集,于是设计了下面的实验方案,这里记录下执行过程中遇到的一些工程问题。
基本思路是通过离散人上肢可达操作空间,然后采点,多次测量人手掌中心到采样点的运动轨迹,但空间中直接采点测量存在较大难度,精度也达不到要求,于是通过引入协作机器人UR5来辅助定位,在编写好程序之后,能够适应不同受试者臂长,并且能够做到对空间中点随机采样。
示意图如下
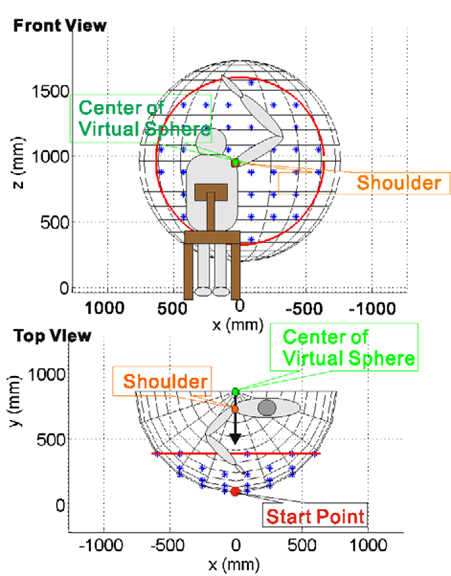
坐标系原点O与实验对象利手侧肩部盂肱关节旋转中心对齐,双肩连线为X轴,盂肱关节旋转中心的铅垂线为Z轴,Y轴垂直于冠状面并指向实验对象正前方,只讨论Y轴正半轴,也就是冠状面以前部分的工作空间。以球极坐标描述实验工作区各点,以实验对象臂长AL为半径作为工作空间边界,目标点位于以0.5AL,0.7AL,0.9AL为半径的半球面上,r的取值分别是0.5AL,0.7AL,0.9AL。
在XOY平面上定义手腕与盂肱关节旋转中心连线和Y轴夹角为方位角,手腕与盂肱关节旋转中心连线与Z轴夹角为俯仰角 。通过三个参数$\gamma$ ,$\theta$,$r$ 来表示腕关节中心在球面坐标系下表达。
实现流程
- 用vicon测量人体肩关节中心与jUR5基座中心相对姿态
- 以人体肩关节为中心,臂长为参数,离散操作空间采样点
- 将采样点按照相邻顺序,序列化“一条线” 目的为了减少机械臂在相邻采样点关节运动范围。
- 处理UR5多组反解,优选不与机架存在干涉的解 并且尽量减少相邻两次运动中关节角移动
注意点
需要注意的是第4步我们使用了第三方库得到UR5所有的8组反解, 这个库用到了ikfast,因此依赖Egien,如果系统没有安装,记得添加上。
其次反解库对C++做了封装,提供matlab接口,因此还需要安装C++-mex编译器。
我们之所以手动做反解,不用UR5自带的反解器是因为我们一开始的确是发送操作空间指令,即给定目标点位姿。但是在实际执行中发现在相邻两次运动中,即使目标点距离很近,但是由于UR5存在多组反解,这就可能导致两次运动中关节角实际变换特别大,超出了关节角限制